
peces Llit soldat d'una sola peça amb estructura penjant lateralment
Llit soldat d'una sola peça amb estructura penjant lateralment El llit adopta una estructura de suspensió lateral i un llit soldat d'una sola peça, que està recoit per eliminar les tensions internes. Després del mecanitzat en brut, es realitza un envelliment per vibració abans d'acabar el mecanitzat, millorant així considerablement la rigidesa i l'estabilitat de la màquina-eina i garantint la precisió de la màquina-eina. L'accionament del servomotor de corrent altern està controlat pel sistema de control numèric, i el mandril realitza un moviment alternatiu en la direcció Y després que el motor s'accioni, realitzant un moviment ràpid i un moviment d'alimentació. Tant el bastidor de l'eix Y com el carril de guia lineal estan fets de productes d'alta precisió, que garanteixen eficaçment la precisió de la transmissió; els interruptors de límit a tots dos extrems de la carrera estan controlats i s'instal·la un dispositiu de límit dur al mateix temps, que garanteix eficaçment la seguretat del moviment de la màquina-eina; la màquina-eina està equipada amb el dispositiu de lubricació automàtic que afegeix oli lubricant a les parts mòbils del llit a intervals regulars per garantir que les parts mòbils funcionin en bon estat, cosa que pot millorar la vida útil dels carrils de guia, engranatges i bastidors.
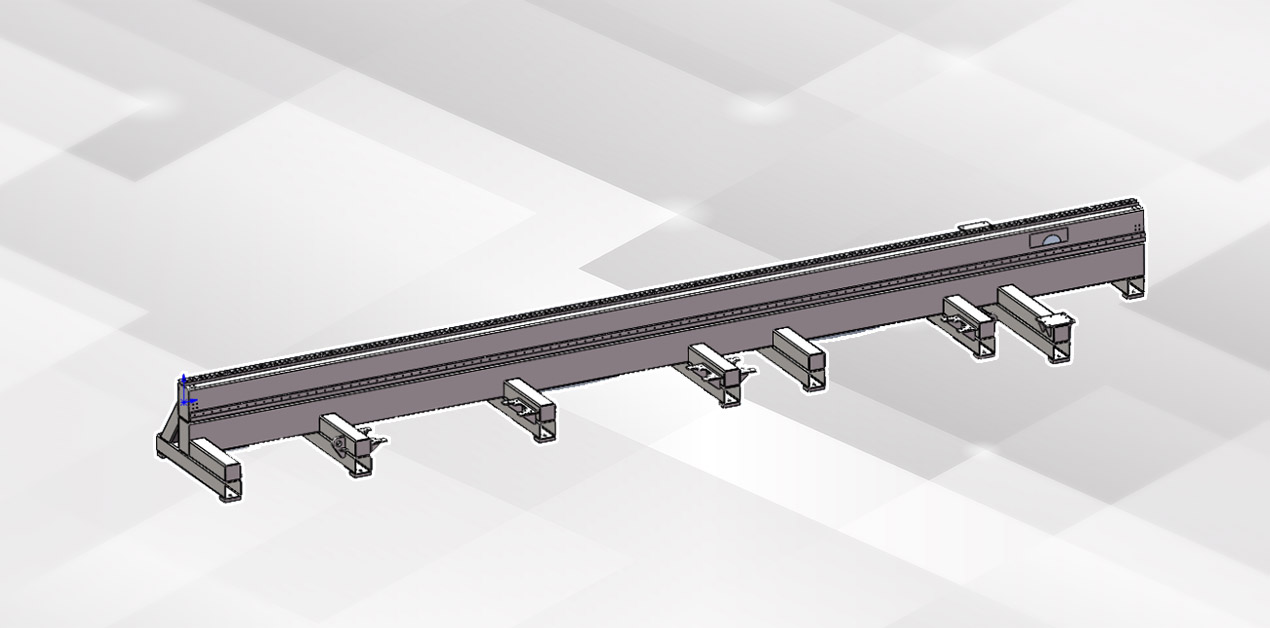
Hi ha 2 conjunts de mecanismes de suport instal·lats al llit, i n'hi ha dos tipus disponibles: 1. El suport de seguiment està controlat per un servomotor independent per moure's amunt i avall, principalment per dur a terme un suport de seguiment per a la deformació excessiva de canonades de tall llarg (canonades amb diàmetres petits). Quan el mandril posterior es mou a la posició corresponent, el suport auxiliar es pot baixar per evitar-ho. 2. El suport de la roda de diàmetre variable s'aixeca i baixa mitjançant el cilindre, i es pot ajustar manualment a diferents posicions d'escala per suportar canonades de diferents mides.
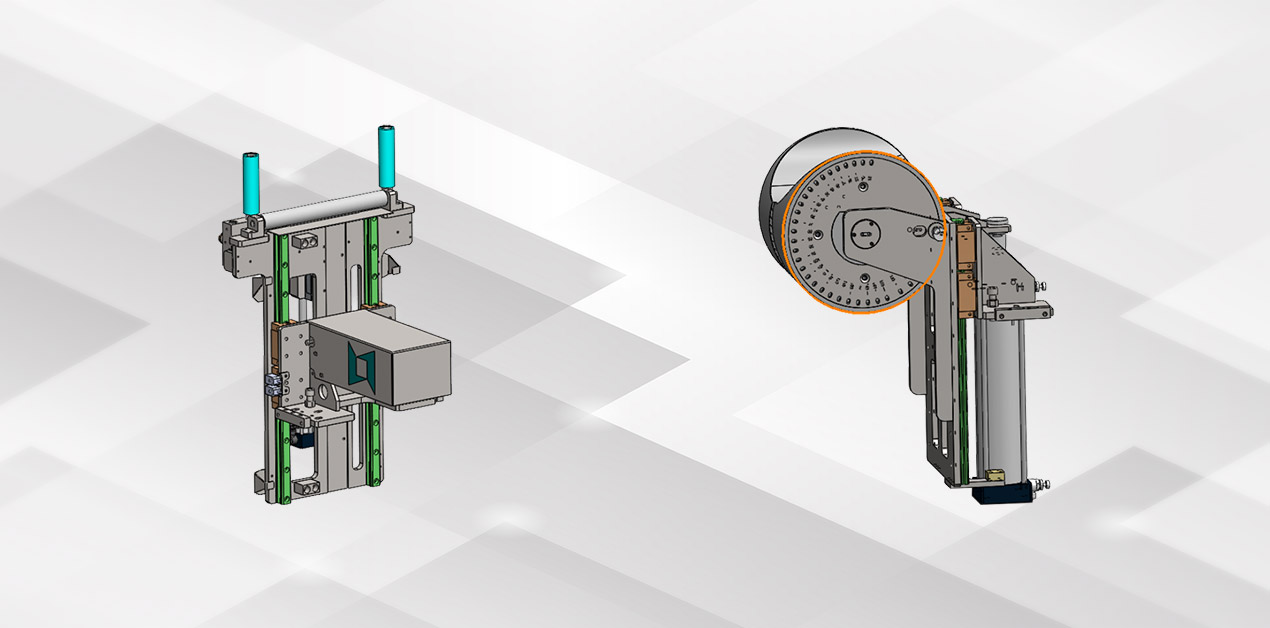
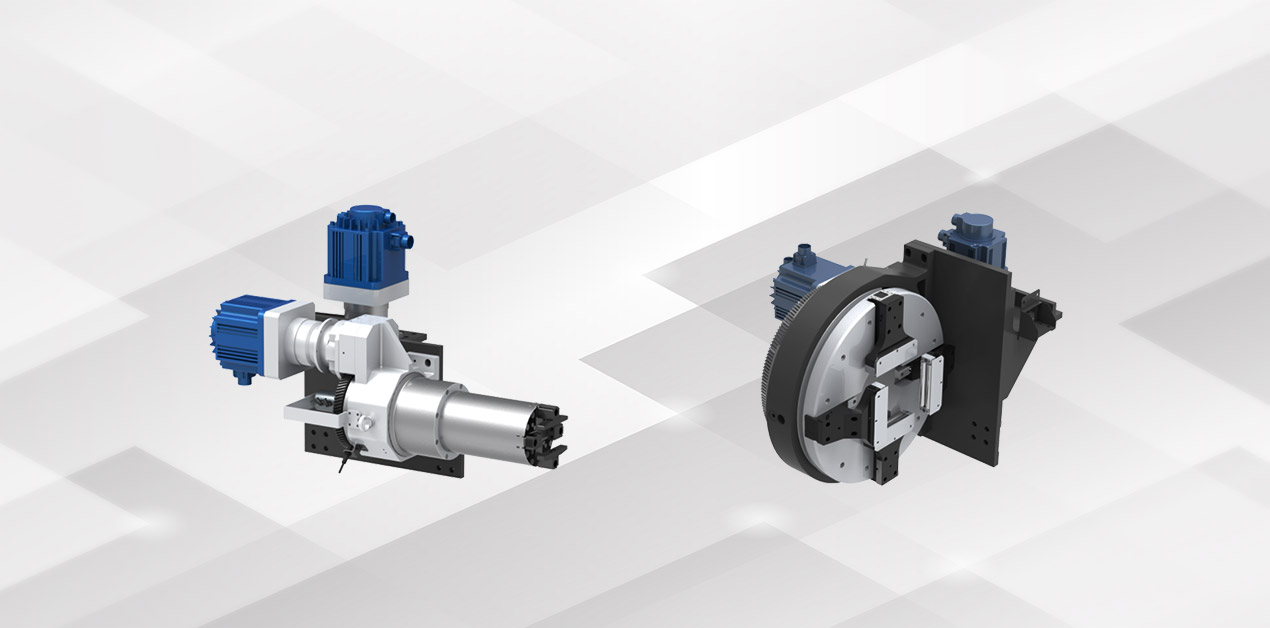
El mandril es divideix en dos mandrils pneumàtics de cursa completa, davanter i posterior, que es poden moure en la direcció Y. El mandril posterior és responsable de subjectar i alimentar el tub, i el mandril frontal s'instal·la al final del llit per subjectar materials. Els mandrils davanter i posterior són accionats respectivament per servomotors per aconseguir una rotació síncrona. Sota la subjecció conjunta dels mandrils dobles, es pot realitzar un tall de cua curta, i la cua curta de la boca pot arribar als 20-40 mm, alhora que suporta el tall de cua curta de cua més llarga. La màquina de tall de tubs de la sèrie TN adopta el mètode de moviment i evitació del mandril, que pot realitzar el tall amb dos mandrils tot el temps, i no farà que el tub sigui massa llarg i inestable, i la precisió no sigui suficient.
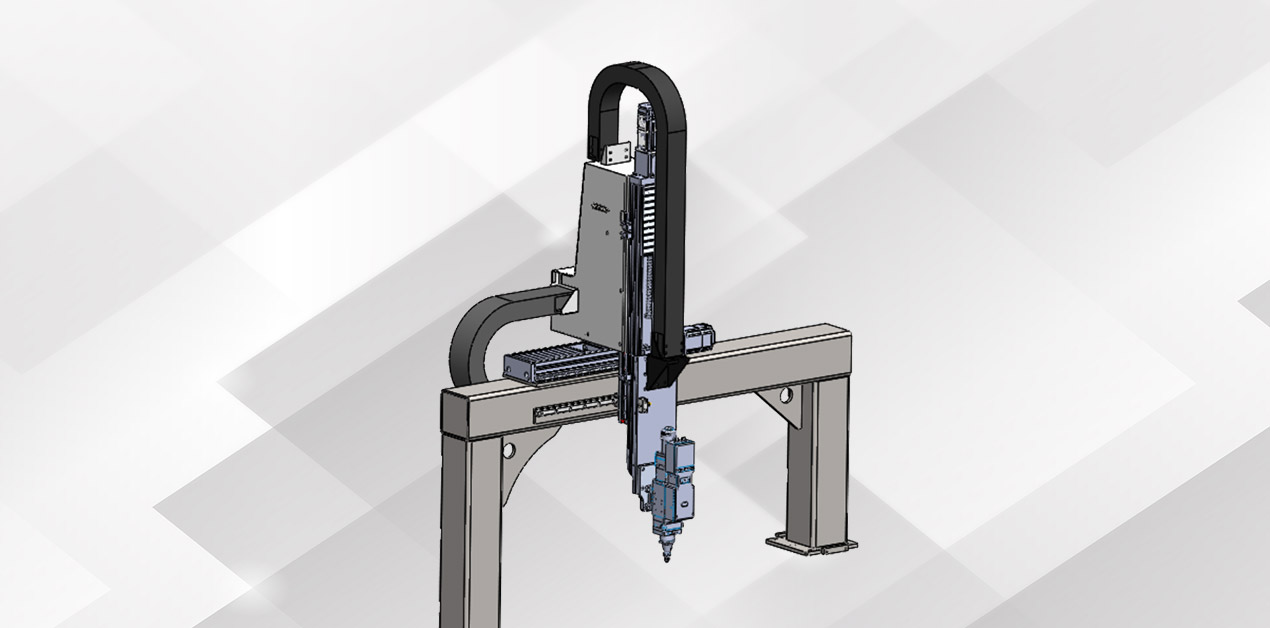
La biga transversal del dispositiu de l'eix X adopta una estructura de pòrtic, que està soldada per una combinació de tub quadrat i placa d'acer. El component del pòrtic està fixat al llit i l'eix X és accionat per un servomotor per impulsar la cremallera i el pinyó per realitzar el moviment alternatiu de la placa lliscant en la direcció X. En el procés de moviment, l'interruptor de límit controla la cursa per limitar la posició per garantir la seguretat del funcionament del sistema. Al mateix temps, l'eix X/Z té la seva pròpia coberta d'òrgan per protegir l'estructura interna i aconseguir una millor protecció i efectes d'eliminació de pols. El dispositiu de l'eix Z realitza principalment el moviment amunt i avall del capçal làser. L'eix Z es pot utilitzar com a eix CNC per realitzar el seu propi moviment d'interpolació i, alhora, es pot vincular amb els eixos X i Y, i també es pot canviar al control de seguiment per satisfer les necessitats de diferents situacions.